Belotti integrale
Célula robotizada modular capaz de integrar sistemas y lenguajes de CNC y robótica y encajarse en una línea de producción altamente automatizada.

Optimizar el ciclo de producción, aumentando la producción mediante un nivel cada vez más alto de automatización de la instalación. Para responder lo mejor posible a las necesidades del sector automotriz, Belotti ha desarrollado, en estrecha colaboración con KUKA y Siemens, Belotti Integrale, una célula robotizada de dos niveles para el mecanizado de materiales avanzados (carbono, Kevlar, aleaciones ligeras).
Descripción
Retos y objetivos del proyecto:
- Garantizar la flexibilidad y la facilidad de uso.
- Optimizar el rendimiento y la eficacia de la producción.
- Formar parte de una línea automatizada, en un contexto de Flexible Manufacturing Systems (Sistemas de Fabricación Flexible).
La línea piloto Belotti Integrale ha sido instalada como módulo de apoyo en la línea de montaje del super SUV Urus de Automobili Lamborghini en Sant’Agata Bolognese, marca líder en el sector automotriz de lujo de propiedad de la alemana Audi (Grupo Volkswagen).
De hecho, Belotti Integrale es una célula robotizada que se integra con las máquinas CNC tradicionales ya presentes en la instalación de producción del cliente y se comunica con sus sistemas de carga/descarga de palés y de transporte/transferencia de equipos.
Los robots antropomórficos de alta precisión del interior de la máquina garantizan un alto nivel de precisión y atención al detalle en el recorte, taladrado y bruñido de materiales compuestos (como la fibra de carbono) y componentes de aleación de aluminio utilizados en el sector automotive de alta gama.
En el nivel inferior, una mesa móvil situada en el centro de la máquina está servida por dos lanzaderas laterales que recogen el palet del sistema existente y lo introducen en la célula. Se han previsto puertas automáticas estancas al polvo que se abren y cierran rápidamente en las proximidades de la lanzadera.
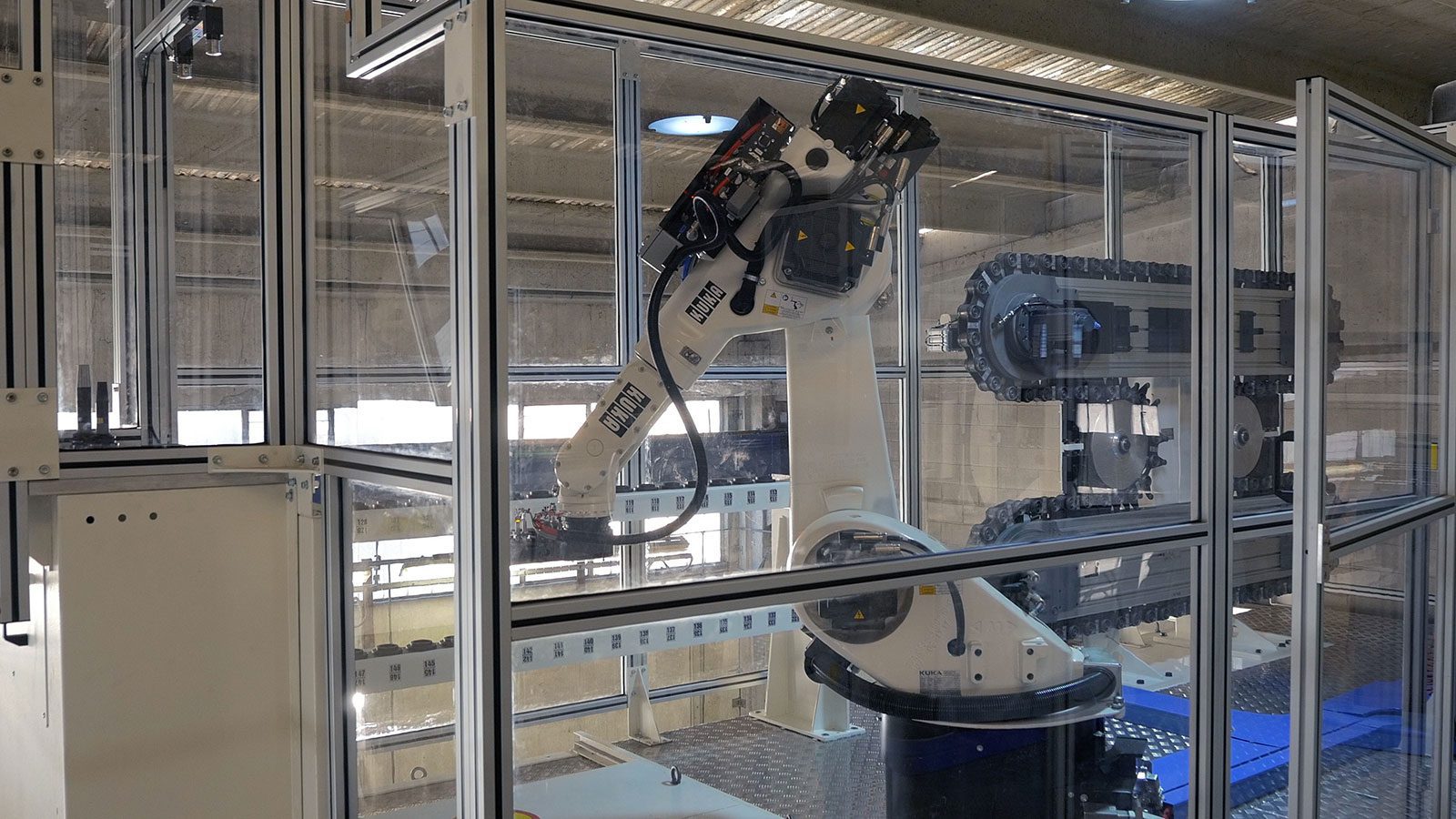
A continuación, el mecanizado de materiales se realiza mediante un primer robot KUKA (modelo QUANTEC KR 270 R2700) suspendido del techo para acceder a varios puntos de la propia célula. El mecanizado también se ve facilitado por la mesa giratoria, capaz de disponer las distintas caras de la pieza frente al robot. Principalmente, el mecanizado de carrocerías de material compuesto implica fresado, taladrado, recorte y todas las demás operaciones especiales solicitadas por el cliente, con la posibilidad de instalar herramientas específicas también para automatizar procesos que antes se hacían manualmente.
Por necesidades de espacio, se ha creado un altillo elevado para la parte de utillaje, que normalmente se coloca en el suelo. En el nivel superior opera con precisión un segundo robot KUKA (modelo KR 30) para las funciones de cambio y medición de herramientas. El intercambio con el primer robot se efectúa a través de una abertura específica en el techo. El segundo robot accede a un almacén de intercambio «rápido» de 36 posiciones para recoger las herramientas en uso durante el mecanizado y realiza durante los tiempos muertos un mecanizado secundario: es decir, traslada las herramientas al almacén de cadena «lento», que sirve de apoyo y almacenamiento, para una disponibilidad constante, y prepara las herramientas para el siguiente mecanizado.
Además, el segundo robot recoge del robot del nivel inferior la herramienta que acaba de terminar de funcionar, reconoce sus especificaciones, detecta sus dimensiones y la coloca en el almacén o en otro lugar específico en caso de desgaste excesivo o rotura. La carga principal de las herramientas se realiza manualmente: el operador, en función de los ciclos de trabajo, precarga un determinado número de herramientas en la máquina, utilizando un elevador especial para llevarlas al nivel superior, donde a continuación serán manipuladas por el robot KUKA, que las recoge, las lee para su confirmación y las coloca en el lugar dedicado. En caso de necesidad, la máquina puede ser controlada por el operador en la planta inferior, mientras que el acceso a la planta superior se realiza a través de una escalera, para el mantenimiento y la posible inspección. De hecho, el utillaje y la gestión de herramientas, altamente personalizados, pretenden que la máquina funcione de forma autónoma, sin supervisión, incluso durante largos periodos de tiempo.
La realización de toda la solución Belotti fue posible gracias a la apertura y flexibilidad de los CNC Siemens Sinumerik ONE, que permitieron «controlar» y programar fácilmente las operaciones altamente complejas de los dos robots KUKA, gestionando al mismo tiempo el diagnóstico y permitiendo al cliente final disponer de un único punto de acceso para la asistencia remota necesaria.
La complejidad de esta solución Belotti está relacionada precisamente con el altísimo grado de automatización que la caracteriza y que responde a la necesidad del cliente de optimizar el ciclo de producción, aumentando la productividad de las piezas mecanizadas en aproximadamente un 30%.
La máquina, que puede insertarse fácilmente en un proceso de producción existente, permite un alto grado de modularidad. De hecho, el cliente puede elegir en la fase de negociación o añadir posteriormente los módulos que mejor se adapten a sus necesidades. En comparación con los sistemas cerrados tradicionales, Belotti Integrale permite por tanto actualizar la línea con mayor facilidad, añadiendo módulos según las funciones requeridas o las nuevas necesidades de producción. De hecho, cada módulo representa una función, una elaboración específica que el cliente pretende introducir. Además, esta característica permite una mayor flexibilidad, así como la posibilidad de hacer evolucionar la propia línea sin anular las inversiones anteriores. Un concepto muy similar al del software: a partir de un módulo básico se puede construir el producto según las especificaciones del cliente y mantenerlo constantemente actualizado.
Belotti Integrale se encuentra entre las primeras aplicaciones del mundo que integran robótica y CNC: de hecho, los robots se controlan a través de la funcionalidad Sinumerik Integrate Run MyRobot mediante el control numérico de Siemens, lo que permite al cliente programar el robot con el clásico lenguaje ISO típico de las máquinas herramienta.
Esto ha sido posible gracias a la colaboración de dos grandes actores mundiales como KUKA y Siemens, con la definición de una interfaz que permite el intercambio de datos entre los dos sistemas relacionados y el trabajo de Belotti, la unión final que ha integrado estos mismos sistemas y lenguajes dentro de su máquina de control numérico.
El CNC Sinumerik de Siemens, capaz de dialogar perfectamente con el software de control de KUKA para la gestión de robots, era la solución ideal para lograr la integración entre la tecnología CNC y los robots: una solución de automatización inteligente para el beneficio total del cliente.
Ponte en contacto con nosotros para obtener más información técnica o comercial o para solicitar una presentación en línea.
Galería de fotos





Ponte en contacto con nosotros para información sobre productos, asistencia técnica o solicitud de repuestos.

